
Figure. STEVAL-MKI134V1 - LIS3DSH adapter board for standard DIL24 socket.
Its acceleration values are output in 16 bit digital numbers. The output data rate (ODR) can be up to 1600.
Resolution of its digital output
$$ \text{mg/digit} = \frac{2g - (-2g)}{2^{16}-1} = 61 \text{ } \mu \text{g} = 0.5966 \text{ mm s}^{-2} $$
where the gravity at Singapore is 9781 mm s-2.
Therefore, its resolution due to its digitization is 61 μg/digit. In face, the actual sensitivity of the accelerometer (sensing resolution) depends on its noise floor. Its noise density as in the datasheet is 150 μg/sqrt(Hz). For a bandwidth of 100 Hz, its sensing resolution will be 1500 μg.
$$ An = {150} \times {\sqrt{BW}} = 1500 \text{ } \mu \text{g} = 14.67 \text{ mm s}^{-2} $$

Figure. Pin connection.
Using SPI Interface
An example schematic circuit diagram for LIS3DSH to use SPI interface is shown below. In this example, only 4-wires are used and interrupt is not utilized.
Figure. LIS3DSH electrical connection using SPI
In the following example, schematic and program for using LIS3DSH accelerometer with Arduino Uno through SPI interface is presented. Digital IO of Arduino Uno is 5V while that of LIS3DSH is 3.3V. Therefore, a bi-directional logic level converter is used to interface them. Schematic circuit diagram with STEVAL-MKI134V1 adapter board is shown below.
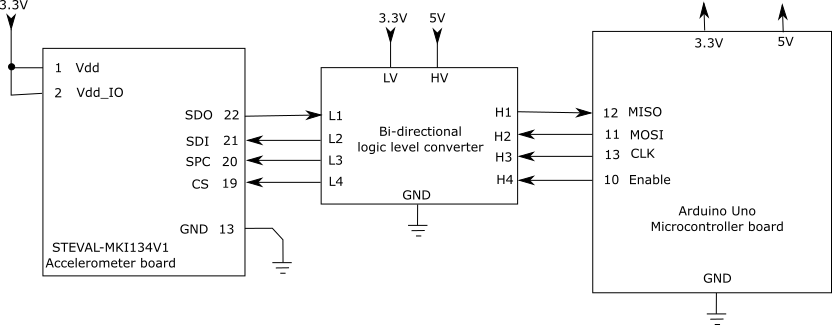
Figure. Schematic circuit diagram for STEVAL-MKI134V1 using SPI.

Figure. Wire connection for SPI.
SPI library for Arduino is used for Serial Peripheral Interface (SPI) - Mode 3, MSB first.
#include <SPI.h>
const int CS_Pin = 10;// set pin 10 as the chip select
SPISettings settingsA(2000000, MSBFIRST, SPI_MODE3); // set up the speed, data order and data mode
//SPI pin configuration: pin 11 as MOSI (SDI), pin 12 as MISO (SDO) , pin 13 as clock (SPC)
int x,y,z;
float K=0.061; // (4000/65535) milli-g per digit for +/-2g full scale using 16 bit digital output
void setup() {
Serial.begin(9600);
pinMode (CS_Pin, OUTPUT); //Chip Select pin to control SPI
digitalWrite(CS_Pin, HIGH);//Disable SPI
SPI.begin();
SPI.beginTransaction(settingsA);
digitalWrite(CS_Pin, LOW);//Enable SPI
SPI.transfer(0x20);//Send address of 'Control register 4' to write configuration
SPI.transfer(0x7F);//Write a value that enables x,y,z accelerometers
digitalWrite(CS_Pin, HIGH);//Disable SPI
}
void loop() {
delay(1000);
digitalWrite(CS_Pin, LOW);//Enable SPI
SPI.transfer(0xA8);//Send address of LSB of x. Address is auto-increased after each reading.
x = SPI.transfer(0) | SPI.transfer(0)<<8; //x acceleration
y = SPI.transfer(0) | SPI.transfer(0)<<8; //y acceleration
z = SPI.transfer(0) | SPI.transfer(0)<<8; //z acceleration
digitalWrite(CS_Pin, HIGH);//Disable SPI
Serial.println("x=" + String(K*x)+" mg \ty=" + String(K*y)+" mg \tz=" + String(K*z)+" mg");
}
Using I2C Interface
I2C interface with LIS3DSH is shown below.
Figure. LIS3DSH electrical connection using I2C


Figure. Schematic circuit diagram for STEVAL-MKI134V1 using I2C.

Figure. Wire connection for I2C
For I2C (Inter-Integrated Circuit), Wire Library for Arduino is used.
#include <Wire.h>
int x,y,z;
float K=0.061; // (4000/65535) milli-g per digit for +/-2g full scale using 16 bit digital output
void setup()
{
Wire.begin(); // join i2c bus (address optional for master)
Serial.begin(9600); // start serial for output
Wire.beginTransmission(0x1E); // transmit to device #30
Wire.write(0x20);//Send address of 'Control register 4' to write configuration
Wire.write(0x7F);//Write a value that enables x,y,z accelerometers
Wire.endTransmission();// stop transmitting
}
void loop()
{
delay(1000);
Wire.beginTransmission(0x1E); // transmit to device #30
Wire.write(0x28);//Send address of LSB of x. Address is auto-increased after each reading.
Wire.endTransmission(); // stop transmitting
Wire.requestFrom(0x1E, 6); // request 6 bytes from slave device #30
x = Wire.read() | Wire.read()<<8; //x acceleration
y = Wire.read() | Wire.read()<<8; //y acceleration
z = Wire.read() | Wire.read()<<8; //z acceleration
Serial.println("x=" + String(K*x)+" mg \ty=" + String(K*y)+" mg \tz=" + String(K*z)+" mg");
}
A code sample for NXP LPC54102 dual core ARM microcontroller to read accelerometers and a gyroscope can be found at the following link together with the above examples.
Accelerometer_LIS3DSH_ADIS16003 on GitHub

Figure. A gyroscope and 4 accelerometers on the bottom side, and a dual core ARM microcontroller on top side of an in-house built embedded circuit board (Ø < 1 in).

Figure. An embedded inertial measurement unit using LPC54102 ARM microcontroller.
Uisg ADIS16003 accelerometer with AT89C51CC03 8051 microcontroller can also be found there too.
No comments:
Post a Comment
Comments are moderated and don't be surprised if your comment does not appear promptly.